Notícias
Robô Aéreo Articulado Versátil DRAGON: Manipulação Aérea e Apreensão por Impulso Vetorável

Um grupo notável de protótipos de drones de uma equipe da Universidade de Tóquio leva a complexidade multirotor para o próximo nível. Esses robôs voadores hipnóticos são capazes de mudar sua forma estrutural no ar, criando algumas capacidades sem precedentes.
Efetivamente, esses bots são construídos em segmentos, e cada segmento possui sua própria unidade de propulsão multicóptero, capaz de vetorizar o impulso em qualquer direção graças aos sistemas cardan multieixos. Os segmentos são unidos, mas capazes de se articular em várias direções diferentes, e a equipe descobriu como coordenar todos esses sistemas de propulsão em tempo real, mesmo quando a estrutura muda de forma enquanto voa. O conceito foi originalmente inspirado no pensamento de dragões voadores e na maneira como essas bestas míticas podiam ondular suavemente seus corpos no ar.
“Quando eu era criança, sou da China, então sempre sonhei com dragões”, diz o líder do projeto e professor assistente Moju Zhao. “Existem muitos robôs bioinspirados, as pessoas fazem cães robôs, gatos robôs. O dragão não é um animal real, mas é uma espécie de símbolo sagrado na Ásia. Imagine este robô como um braço humano voador, para fazer manipulação no ar. Para trocar uma lâmpada ou abrir uma porta como um braço humano. Você também pode pensar que este robô pode se transformar como uma cobra; ele pode explorar espaços muito estreitos.”
Na imagem abaixo, você pode ver o estado do robô “Dragão” da equipe. É um pouco instável e um pouco lento, mas considerando a complexidade envolvida no controle de uma aeronave multirotor que muda continuamente sua forma e orientação estrutural, é altamente impressionante. O robô é mostrado começando a lidar com tarefas básicas, como empurrar e puxar objetos, e se enrolar para criar um anel de pinça voador capaz de agarrar, compensar, manipular e soltar objetos de até 1 kg (2,2 lb) de peso.


É uma ideia bastante extraordinária, uma espécie de garra voadora que pode serpentear por uma área, agarrar coisas e realizar tarefas úteis com elas. O Dragão pode usar acessórios semelhantes a pinos para abrir e fechar grandes válvulas, nas orientações ascendente, descendente e horizontal.
A equipe trabalha no Dragon há vários anos, e é fácil ver o potencial de uma plataforma aérea tão flexível quando o software de controle de vôo fica mais rápido e começa a se mover com mais velocidade e fluidez.
Agora, a equipe apresentou uma visão ainda mais estranha do conceito, na forma de seu novo robô “SPIDAR”, um acrônimo tortuoso para “Robô quadrúpede anfíbio assistido por rotores esfericamente vetoráveis e distribuídos”.
O SPIDAR é um robô quadrúpede com articulações articuladas no quadril e joelho de cada perna. Essas articulações são fracamente motorizadas para auxiliar no movimento, mas a equipe procurou minimizar os motores redundantes usando as unidades de propulsão multicóptero vetorizadas em cada segmento como o principal meio de mover as pernas – bem como levantar os 15 kg (33 lb) inteiros. estrutura no ar.
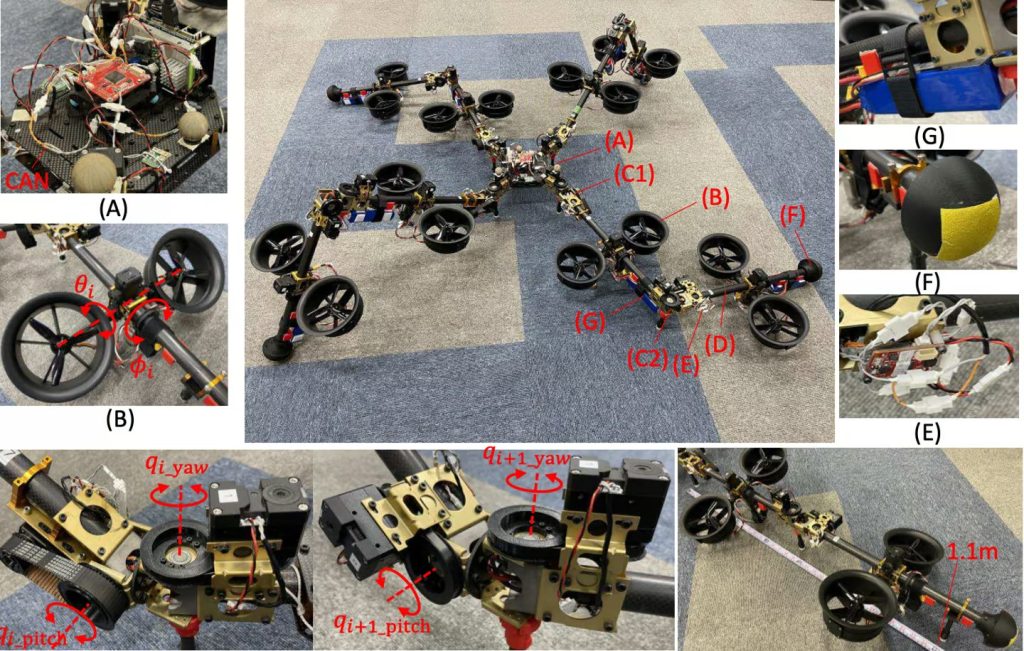

Como mostra a imagem abaixo, o resultado é um robô-aranha extremamente lento e barulhento, cujas pernas parecem fracas e bambas neste estágio. Também parece que está trabalhando duro para permanecer no ar, com vibrações harmônicas entre as unidades de propulsão claramente um problema. O movimento de andar parece um pouco sem sentido – ele pode andar por 20 minutos ou voar por nove minutos com a configuração atual da bateria, e é imediatamente óbvio que um minuto de vôo levará mais tempo do que 10 minutos de caminhada.
Mas ainda levanta algumas possibilidades muito legais; com um pouco mais de desenvolvimento, isso se tornará uma garra voadora de quatro pontas potencialmente capaz de segurar e manipular dois objetos ao mesmo tempo; tirar a tampa de um pote, por exemplo, ou segurar uma caixa enquanto pega algo e coloca na caixa.


Claramente, esses são protótipos muito antigos. Mas com um pouco de imaginação, podemos vê-los se desenvolvendo em robôs lulas voadoras no estilo Matrix com tantos braços quanto possível. Com unidades de propulsão em cada tentáculo ou segmento de perna, os braços não são um peso morto na fuselagem; cada um é um suporte e pode fornecer elevação com vários graus de alavancagem, dependendo de onde a carga está. Essas máquinas podem executar várias tarefas ao mesmo tempo, potencialmente travando seus “braços” livres para apoiar suas estruturas contra paredes, tetos, pisos ou outros objetos sólidos onde força extra ou alavancagem é necessária.