
Dicas
Configurando o GPS Rescue mode do Betaflight

O que é o GPS Rescue mode? Bom, faz um tempo que tenho falado sobre o uso de GPS em drones de corrida. Claro que naquela situação típica em que o drone está voando a 80Km/h em meio a obstáculos e a 30cm do chão um GPS pode não ser uma coisa muito útil, mas ultimamente estão ganhando cada vez mais força os setups com foco em mid range, quer dizer, lembra da TBS Discovery e de como era divertido passear por aí com ela? Pois então, o objetivo é semelhante, mas com a vantagem de serem menores, mais resistentes, e mais divertidos já que temos à disposição todo o poder do freestyle.
O problema é que para fazer vôos mais distantes precisamos de alguns recursos que reduzam os riscos – de perdas e acidentes – em situações de perda de sinal, tanto de rádio quanto de vídeo, e é por isso que o Betaflight dispõe de um modo de vôo especial chamado “GPS Rescue”.
Como funciona o GPS Rescue mode
O modo GPS Rescue do Betaflight é similar ao “Return to Home”. Quando você perde vídeo ou sinal de rádio, o drone deveria retornar para você com base nos dados do GPS.
Não espere, no entanto, que ele funcione da mesma forma que no seu drone DJI, pois não vai. O quad não vai voltar exatamente para o ponto de decolagem, mas perto o suficiente para que você recupere o sinal e o controle.
Requerimentos para o GPS Rescue mode
- Instalar Betaflight 3.5 ou superior
- Configurar o GPS em sua controladora
Barômetro não é necessário, mas recomendado. Bússola não é necessária nem utilizada no Rescue Mode. A Kakute F7 é uma sugestão de placa que possui barômetro.
Configurando o GPS Rescue Mode
Uma vez que você tenha configurado o módulo GPS, restam apenas configurações de software.
Você vai ter que ajustar as configurações para fazer tudo funcionar no seu caso específico. Lembre-se de dar uma boa lida no wiki do Betaflight para compreender exatamente para que serve cada parâmetro: https://github.com/betaflight/betaflight/wiki/GPS-rescue-mode
A primeira coisa a fazer, obviamente, é conectar o drone ao computador e abrir o configurador do Betaflight. Antes de mais nada faça o seguinte. Vá até a aba CLI e digite “get gps”. Você verá toda a lista de parâmetros relacionadas ao uso do GPS. Aqui irei mostrar as configurações que eu alterei para meu quad.
set gps_rescue_min_sats = 6
Seu quad não irá armar se o GPS tiver menos satélites travados do que o valor definido neste parâmetro, então você provavelmente vai querer definir um valor baixo ou até mesmo zero se não quiser esperar antes de cada vôo. Desta forma, quando você quiser usar o GPS, basta esperar até que tenha satélites suficientes antes de decolar. (dá para exibir essa informação no OSD)
Vale lembrar, no entanto, que se você decolar antes que a controladora tenha localizado satélites suficientes, ele não saberá para onde voltar em caso de necessidade. O número recomendado é de 6 a 8.
set gps_rescue_angle = 45
Este valor está em graus. Você provavelmente irá querer um ângulo maior que o valor padrão, para o caso de 30 graus não serem suficientes para o drone enfrentar vento de proa. Por outro lado, se o ângulo for muito grande o drone pode encontrar dificuldades em se manter em vôo, então tudo depende da potência dele.
set gps_rescue_descent_dist = 100
Este valor está em metros. A qual distância de você o drone vai começar a descer. Informe uma distância que você considera segura e que provavelmente já terá recuperado os sinais de vídeo e de rádio de forma confiável.
set gps_rescue_initial_alt = 50
Este valor está em metros. A qual altitude (em relação ao solo) o drone irá voltar para o ponto de decolagem. Deve ser alto o suficiente para evitar obstáculos como árvores, construções e linhas de força, mas não tão alto para que você ainda consiga ver e ouvir ele em linha de visada.
set gps_rescue_ground_speed = 1000
Este valor está em cm/s. Aqui você deverá configurar a velocidade com que o drone irá voltar. Em minha opinião o valor padrão de 2000 cm/s é rápido demais, então reduzi pela metade, 1000 cm/s, que equivale a cerca de 36Km/h.
set gps_rescue_sanity_checks = RESCUE_SANITY_FS_ONLY
Algumas pessoas experimentaram problemas com seus drones desarmando durante o rescue mode. Isso pode ter sido causado por este parâmetro. De acordo com o wiki não é recomendado que esta opção seja desligada, então configurei desta forma para que fique desativada quando o rescue mode for ativado por um switch, mas seja ativada quando o rescue mode for ativado pelo failsafe.
Ativando o GPS Rescue mode
Tem duas formas de ativar o GPS Rescue mode, via failsafe ou via um switch no seu rádio. Eu recomendo que seja configurado primeiro em um switch para testes antes de usar como failsafe.
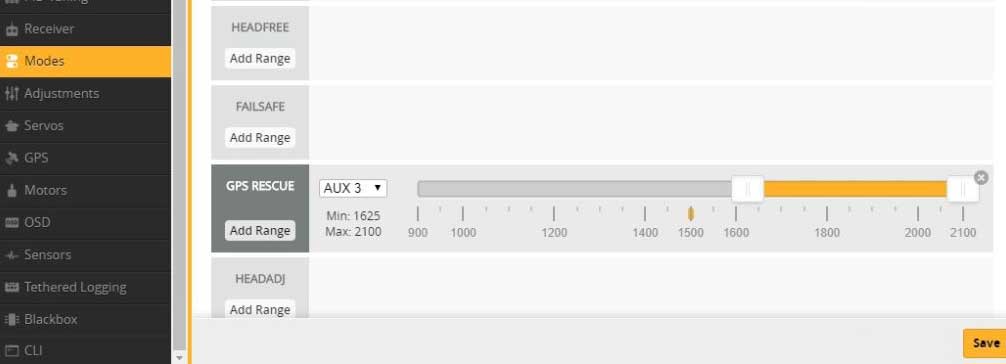
Vá para a aba “Modes” do Betaflight e ative um switch/canal para o GPS Rescue Mode.
Acionando o rescue mode
Testando o GPS Rescue mode
Remova as hélices, certifique-se de que o GPS Rescue mode possa realmente ser ativado pelo rádio, e que você possa voltar para o modo acro.
Tenha em mente que as configurações dependem do seu modelo e do ambiente então teste tudo muito bem. Faça isso em um campo aberto sem obstáculos ou pessoas.
Colocar estes elementos relacionados ao GPS em seu OSD irão ajudá-lo a compreender o que seu quad está fazendo.
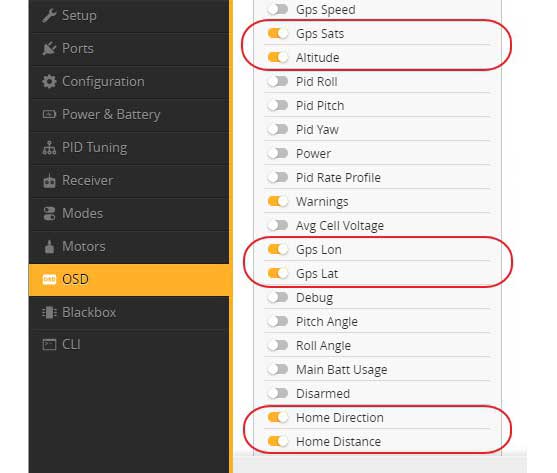
Elementos para o OSD
Voe em uma linha reta, além da distância configurada em “gps_rescue_descent_dist”. Por exemplo, se esta distância estiver configurada para 100 metros, voe por 130 ou 150 metros.
Preste atenção à “home arrow” do Betaflight OSD, certifique-se de que ela está de fato apontando para o ponto de partida. Se não estiver provavelmente tem algo errado e você não deve ativar o GPS Rescue mode. Se ativar pode ser que o quad acabe voltando para a casa de alguma outra pessoa.
Usando o GPS Rescue mode como Failsafe
Uma vez que você configurou e testou tudo, você poderá definir o rescue mode como failsafe. Vá até a CLI e digite
set failsafe_procedure = GPS-RESCUE save
Note que seu quad irá assumir o rescue mode caso o sinal de rádio seja perdido, e irá voltar para o modo acro quando o sinal for restaurado. Neste ponto é possível que seu sinal de vídeo ainda esteja comprometido e você pode ter que voar às cegas.
Por este motivo é importante sempre associar o rescue mode a um canal do rádio. Quando o failsafe ocorrer, acione o switch associado ao rescue mode também, e apenas retome o acro mode quando estiver tudo sob controle.
O que acontece quando o GPS Rescue Mode é ativado?
O drone vai subir ou decer para atingir a altitude definida em “gps_rescue_initial_alt”, vai girar para apontar para o ponto de decolagem e iniciar a viagem de volta. Quando estiver perto o suficiente, dará início a descida.
Este artigo foi postado originalmente no blog Oscar Liang e foi traduzido para o português e postado no blog dronemodelismo com autorização prévia do autor.











